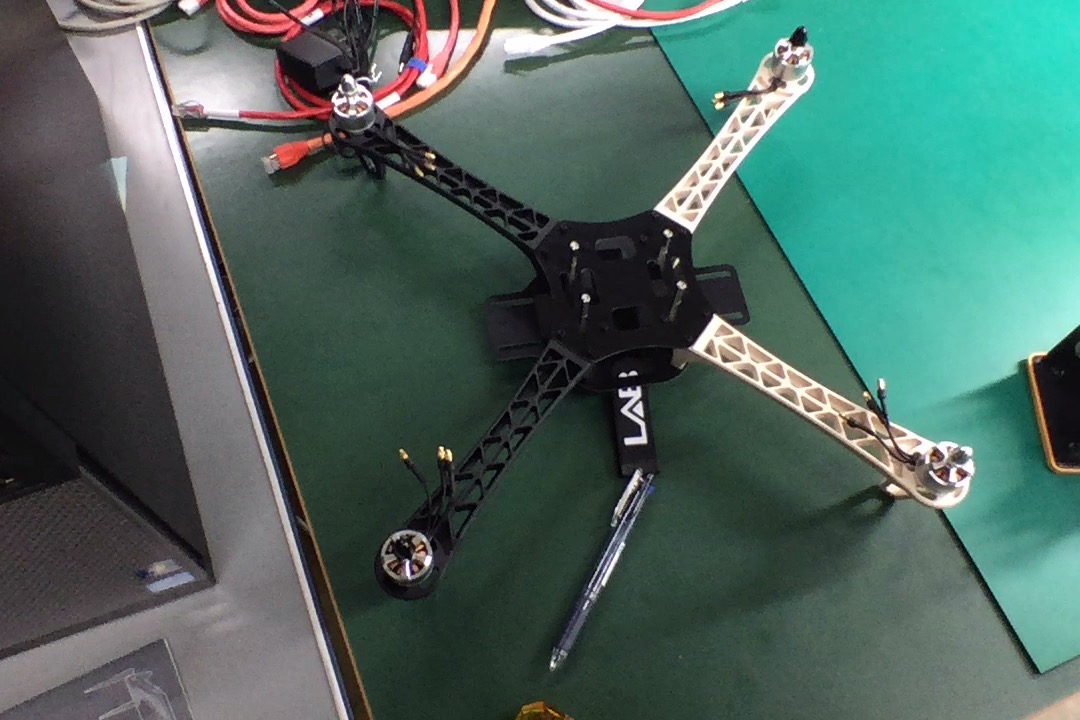
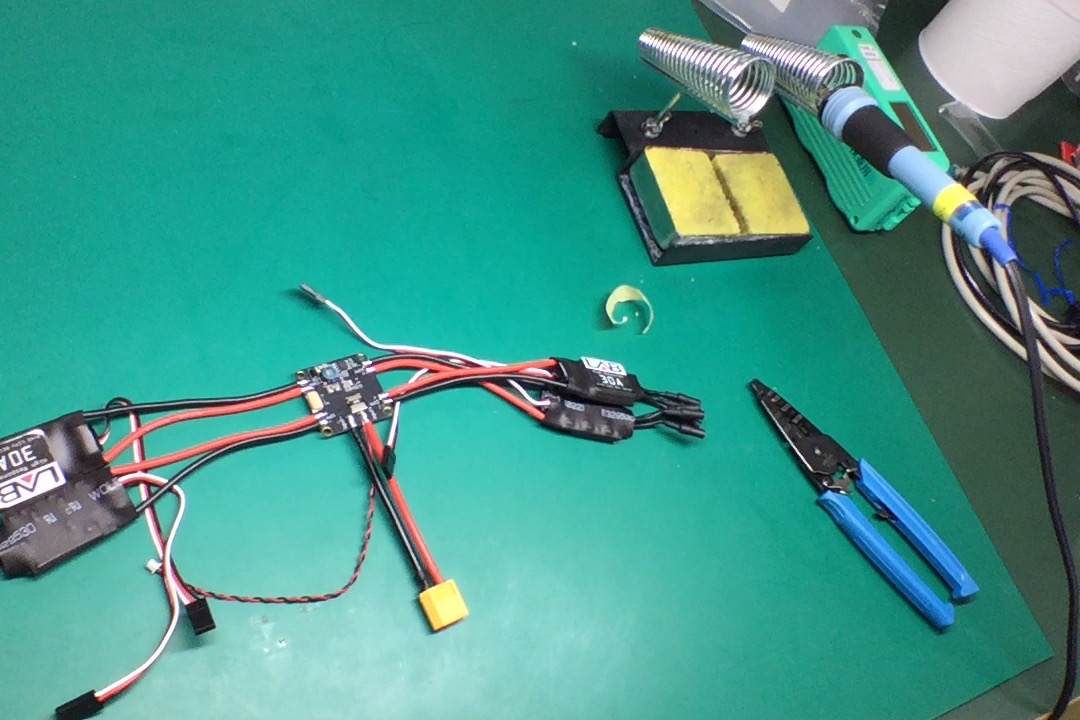
I made a drone by myself
I used a LAB445 kit to build a drone by myself. It was a great experience to understand how a drone works.
Drone-operation training
I mastered how to operate a drone by using remote-controller and its reciever by operating 4x2 directions(roll, pitch, yaw, throttle) and 2x2 switches @Obihiro, Hokkaido


Develop new flight mode
I developed a new flight mode to ardupilot, which is a popular open-source autopilot software, by using C++.
This enables to control the desired roll, pitch, and yaw rates, along with a smoothing gain to control the responsiveness of the drone to pilot inputs.
I learned how EKF(Extended Kalman Filter) works and how the drone use it to estimate its state.


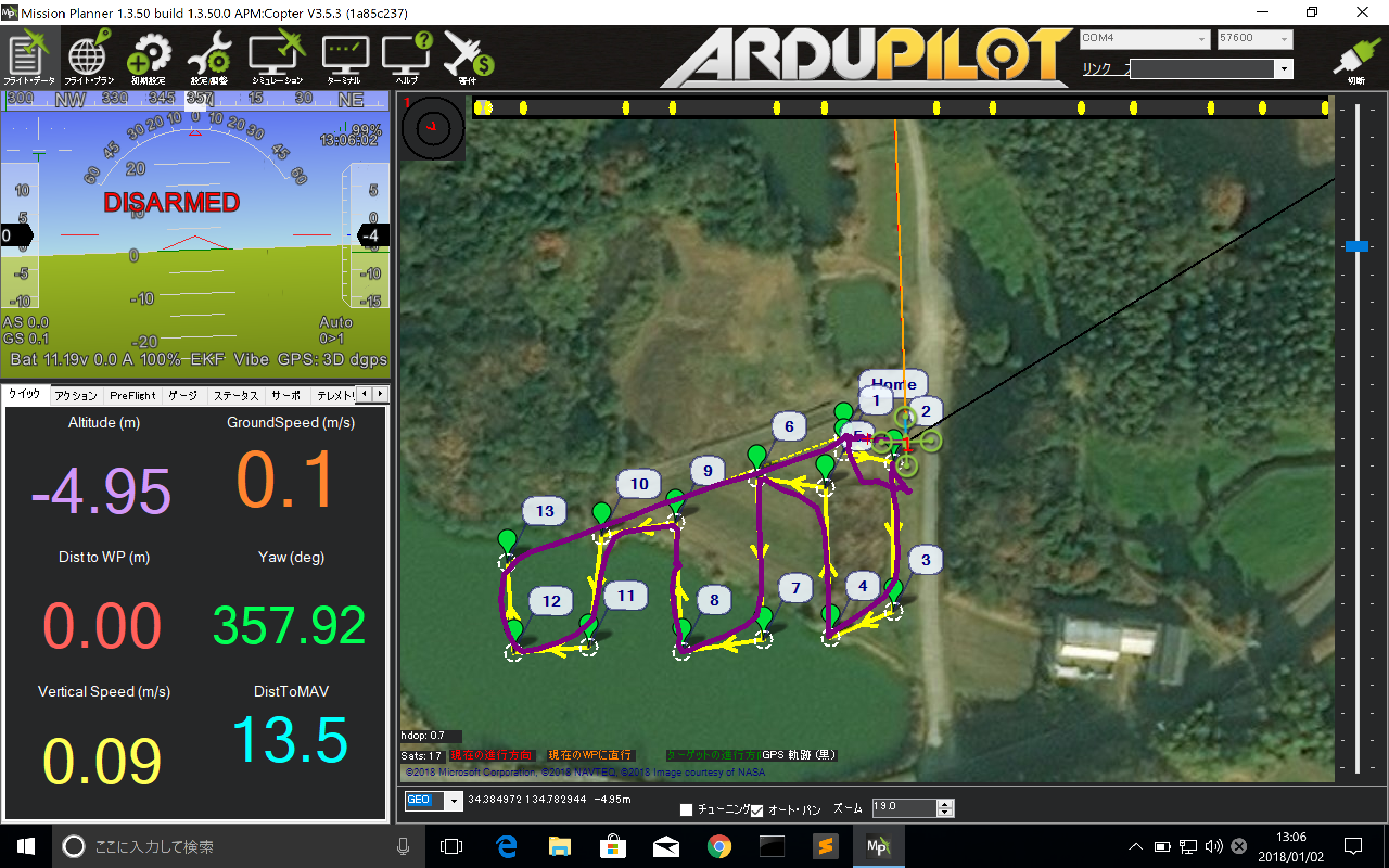
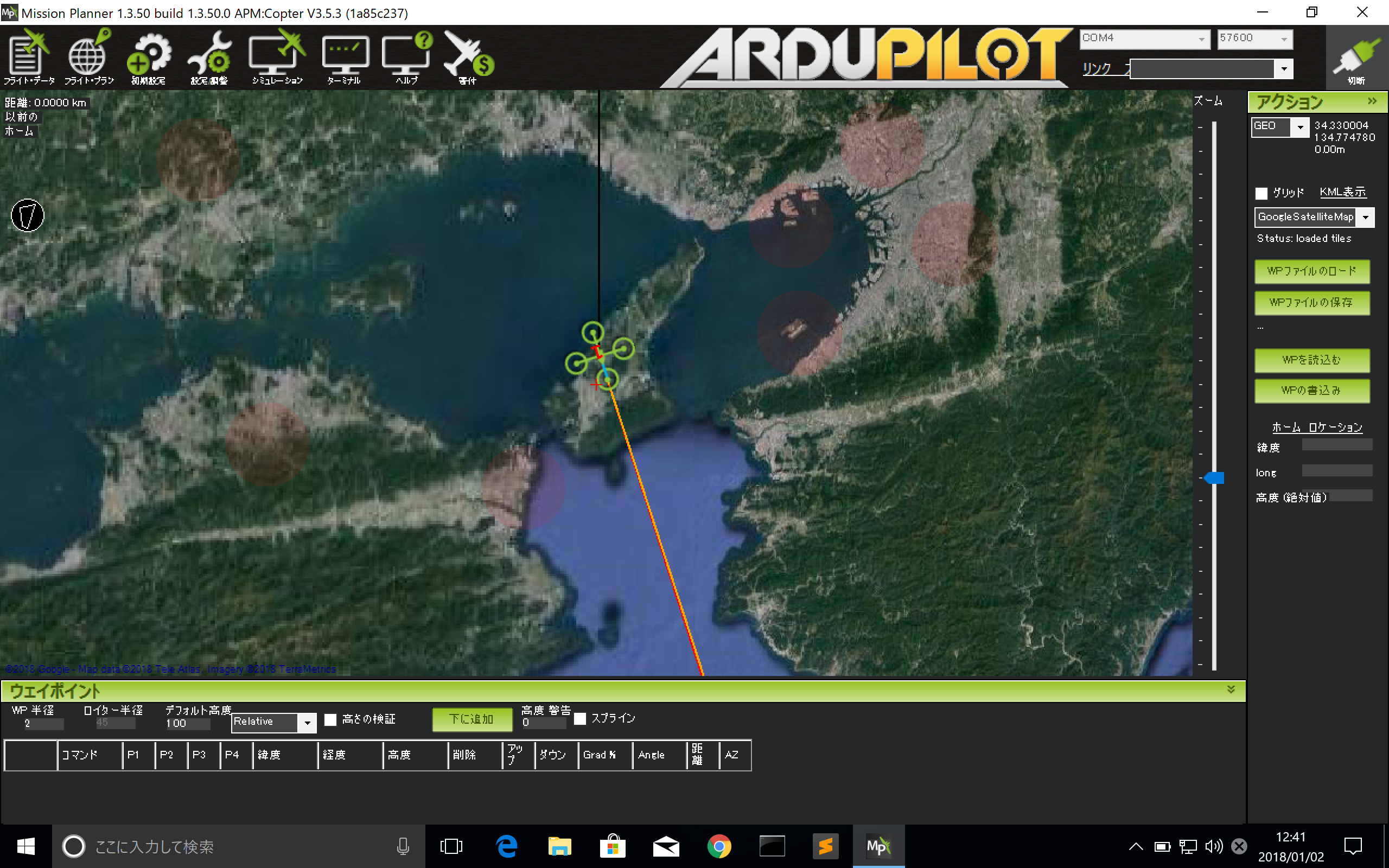
Flight test of autopilot
I achieved autopilot flight with my own code. I did it at Awaji-Island, my hometown, and it was a great experience.
special thanks
- Drone Japan: good community to learn about drone
- Ardupilot: open-source autopilot software
- mooc @youtube: good lecture to understand about EKF and autopilot

